SAP
思爱普
面试题
课设
网络安全
阿克曼
测试用例
趣味python
WinLicense
模拟退火算法
智能家居
prometheus
度中心性
Impala
html期末大作业
数字签名伪造漏洞
PIXIjs
系统架构师
汉诺塔
MBD
相机
2024/4/13 0:05:12
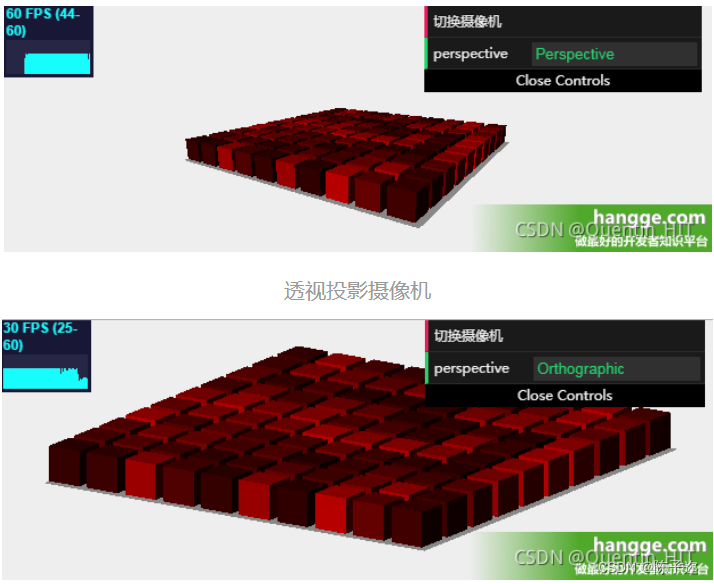
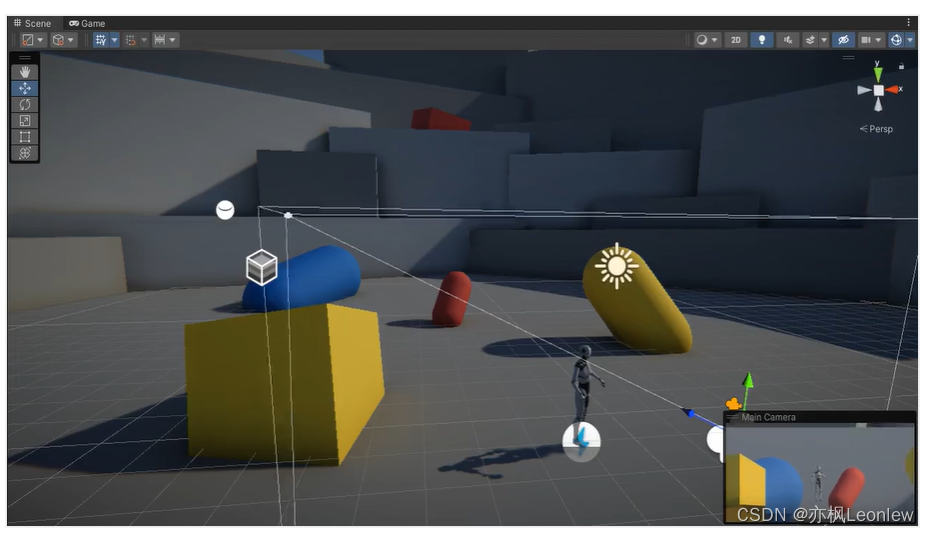
透视相机怎么得到正交效果
1)透视相机怎么得到正交效果 2)Unity 2018异步加载场景时isDone不为true 3)关于AssetBundle的疑惑 4)www下载图片是否支持直接下载成各个平台支持的压缩格式 5)场景CombinedMesh移除法线等多余信息
这是第189篇UWA技术…

Flutter笔记:使用相机
Flutter笔记 使用相机 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/qq_28550263/article/details/134493373 【简介】本文介绍在 Fl…
线扫相机设置编码器触发
以海康威视为例:
1、首先,在采集控制(AcquisitionControl)中把行触发模式(LineStart)打开,并在触发源(TriggerSource)设置选项下选择变频器(FrequencyConver…

将mjpg格式数转化成opencv Mat格式
该博客可以解决如下两个问题: 1、将mjpg格式数据转化成opencv Mat格式 2、v4l2_buffer 格式获取的mjpg格式数据转换成Mat格式。 要将 MJPEG 格式的数据转换为 OpenCV 的 Mat 格式,您可以使用 imdecode 函数。imdecode 函数可以将图像数据解码为 Mat 对象…
OAK相机:自动或手动设置相机参数
OAK相机:自动或手动设置相机参数 硬件软件 硬件
使用硬件如下:
4✖️ov9782相机OAK-FFC-4P驱动板
硬件接线参考博主的一篇博客:OAK相机:多相机硬件同步拍摄 软件
博主使用的是Ubuntu18.04系统,首先配置所需的pytho…
既定脉冲数的 编码器:一个脉冲扫描多长(一个脉冲走多远,距离是固定的。不随转动速度变动!!)
使用线阵相机拍摄传动轴上移动的物体。转动轴直径D固定,使用编码器固定在转动轴上。假设选择2000脉冲的编码器,转轴周长Lmm;
比如:
之前,1s转1圈,发出2000个脉冲;走1Lmm。一个脉冲对应L/2000m…

计算机视觉的相机选型
#你一般什么时候会用到GPT?#
目前市面上的工业相机大多是基于CCD(ChargeCoupled Device)或CMOS(Complementary Metal Oxide Semiconductor)芯片的相机。一般CCD制造工艺更加复杂,也会更贵一点!
1、CCD工…
双极性集成电路芯片 D7312,可用于小型收录机中作前置放大电路。电源开关冲击噪音小、 反应快
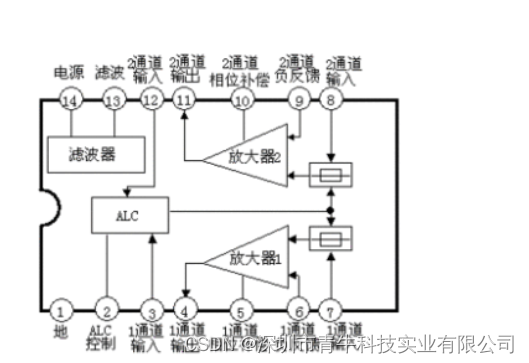
一块双极性集成电路芯片 D7312。可用于小型收录机中作前置放大电路。
主要特点: ● 含ALC电路和ALC检波电路。 ● 外接元件少。 ● 增益高,噪声低。 ● 静态电流小 ● 电源开关冲击噪音小、 反应快 ● 具有过热保护功能 …

开源|HDR-ISP开源项目介绍
引言
拖更很久了,本着出品必精的原则,我们更新就来点干货。想起刚入行时,网上并没有很多以及系统的ISP的学习资料,都是边工作、边搜集资料然后边学习,一路坎坎坷坷走到今天算是刚入了ISP的大门。
为了解决新人入门的…
3D雷达和相机联合标定:一种灵活且精确的基于目标的外参标定方法
3D雷达和相机联合标定:一种灵活且精确的基于目标的外参标定方法
论文链接:https://arxiv.org/pdf/2307.15264.pdf
附赠自动驾驶学习资料和量产经验:链接
摘要
本文介绍了3D雷达和相机联合标定:一种灵活且精确的基于目标的外参…

处理点云数据(五):坐标系的转换
相机的内外参矩阵
坐标系
主要有两类坐标系,一类为相机坐标系,一类为世界坐标系(即物体所处真实世界)
内参矩阵
设空间中有一点P,若世界坐标系与相机坐标系重合,则该点在空间中的坐标为(X, Y, Z),其中Z为该点到相…
OPT小讲堂 ∣ SciSmart如何轻松采图和导出图像?
发布时间:2019-04-01 新闻摘自:OPT 在上一课的应用入门中,我们介绍了SciSmart智能视觉软件的软件构架、工作模式、人机交互界面和应用领域,对SciSmart有了一个较为完整、清晰的认识。在今天的第二课中,我们一起来学习一…
华山编程培训中心——工业相机飞拍
飞拍功能是一种高速运动图像采集技术,通过降低相机的曝光时间来拍摄快速移动的对象,以提高工作效率和加快生产速度。下面视频演示工业相机飞拍: 上位机控制工业相机飞拍演示 一. 飞拍对相机硬件的要求
全局快门相机:飞拍要求相机…

工业相机与镜头参数及选型
文章目录 1、相机成像系统模型1.1 视场1.2 成像简化模型 2、工业相机参数2.1 分辨率2.2 靶面尺寸2.3 像元尺寸2.4 帧率/行频2.5 像素深度2.6 动态范围2.7 信噪比2.8 曝光时间2.9 相机接口 3、工业镜头参数3.1 焦距3.2 光圈3.3 景深3.4 镜头分辨率3.5 工作距离(Worki…

计算机视觉基础(7)——相机基础
前言 从这一节开始,我们来学习几何视觉。中层视觉包括相机模型、单目几何视觉、对极几何视觉和多目立体视觉等。在学习几何视觉最开始,我们先来学习一下相机模型,了解相机的基本原理,了解相机如何记录影像。 一、数字相机 1.1 基…
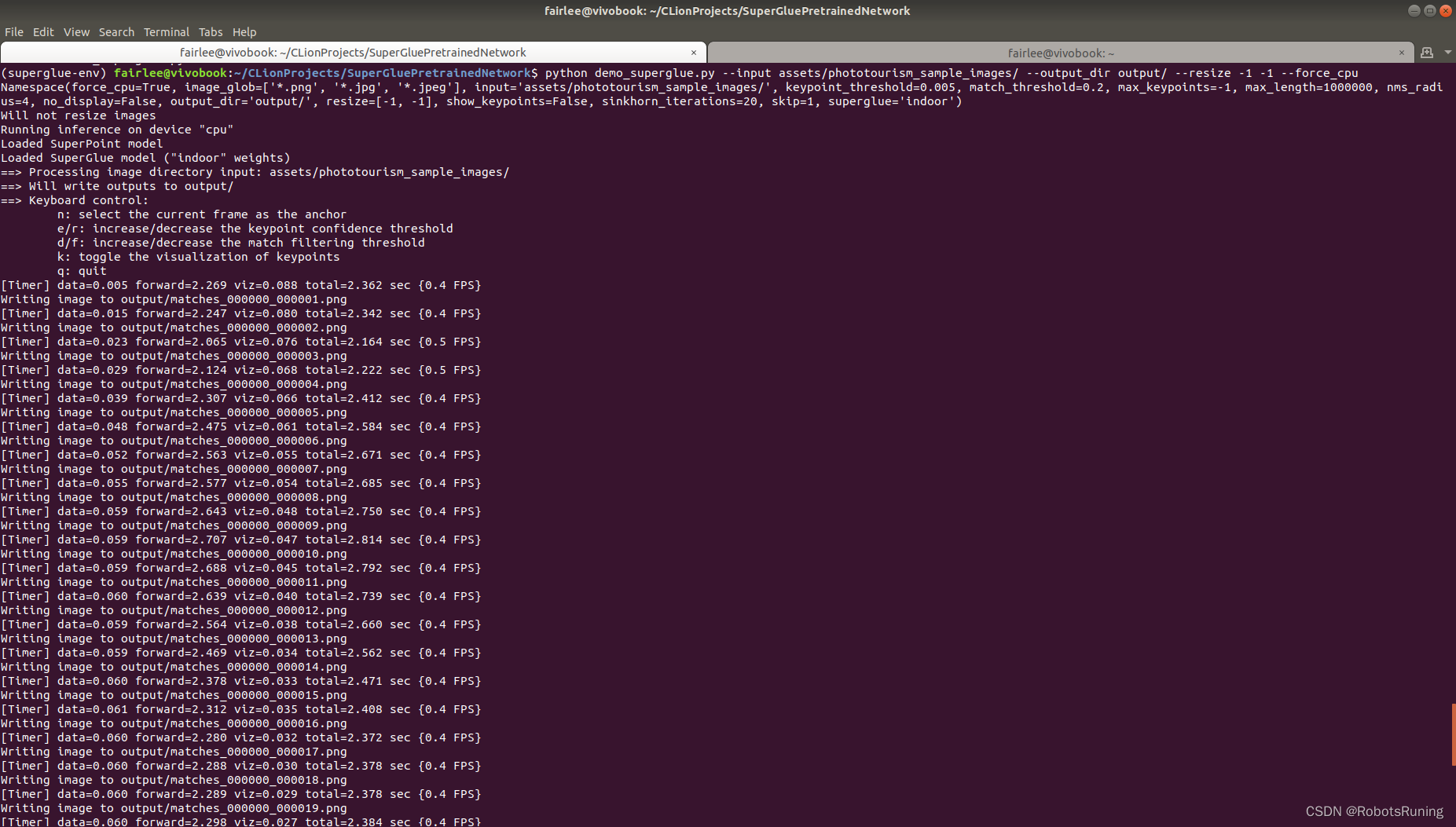
Ubuntu18.04 系统上配置并运行SuperGluePretrainedNetwork(仅使用CPU)
SuperGlue是Magic Leap在CVPR 2020上展示的研究项目,它是一个图神经网络(Graph Neural Network)和最优匹配层(Optimal Matching layer)的结合,训练用于对两组稀疏图像特征进行匹配。这个项目提供了PyTorch代…
C# MG.CamCtrl 工业相机库(开源) 海康 大恒
C# MG.CamCtrl 相机库(开源) 海康 大恒 介绍工厂模式创建实例选取对应SN号的相机,初始化启动相机取图注销相机参数设置/获取接口 介绍
c# 相机库,含海康、大恒品牌2D相机的常用功能。 底层采用回调信号量模式封装 ,最…
视觉slam十四讲学习笔记(四)相机与图像
理解理解针孔相机的模型、内参与径向畸变参数。理解一个空间点是如何投影到相机成像平面的。掌握OpenCV的图像存储与表达方式。学会基本的摄像头标定方法。 目录
前言
一、相机模型
1 针孔相机模型
2 畸变
单目相机的成像过程
3 双目相机模型
4 RGB-D 相机模型
二、图像…

计算机视觉:多相机硬件同步拍摄
计算机视觉:多相机硬件同步拍摄 传感器同步硬件同步信号FSYNC信号STROBE信号 硬件接线硬件设备接线步骤: 软件驱动参考文献 传感器同步
目前主要有两种方法来同步不同传感器的信息(帧、IMU数据包、ToF等):
硬件同步&…

机器视觉选型-什么时候用远心镜头
物体厚 当被检测物体厚度较大,需要检测不止一个平面时,典型应用如食品盒,饮料瓶等。 物体位置变化 当被测物体的摆放位置不确定,可能跟镜头成一定角度时。 物体上下跳动 当被测物体在被检测过程中上下跳动,如生产线上下…

什么是双电机打包机?
我们都知道有的机器可能不只有一个电机,像我们公司最新生产的打包机,双电机打包机就是有两个电机,一个是退带电机,一个是进带电机,两个电机的好处就是更能提高包装速度,而且还能减少故障录,双电…
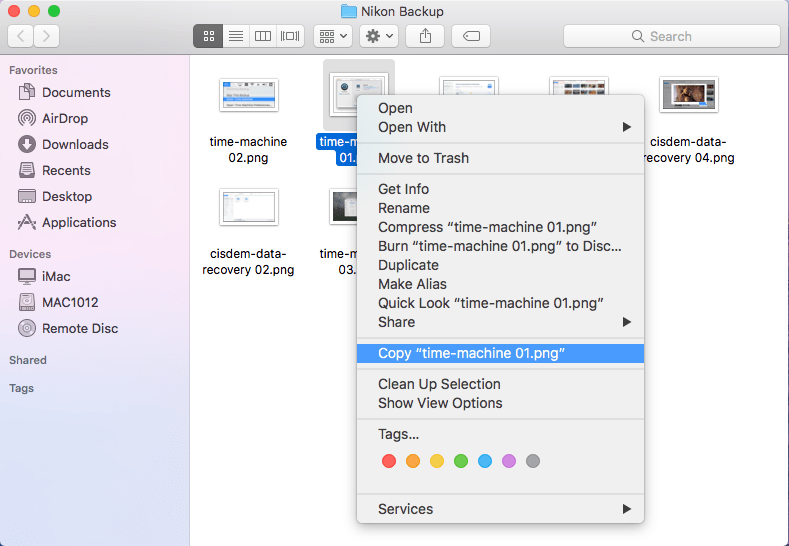
想要在尼康相机上恢复已删除的照片?这几个方法请收好!
尼康是最知名的国际品牌之一,其数码相机产品深受众多摄影爱好者的喜爱。手持尼康相机,壮丽的风景和生动的人物都可以作为一幅幅惊艳的镜头被永远记录下来。
遗憾的是,尼康相机拍摄的照片意外丢失在某种程度上是不可避免的。原因有可能是误删…

Three.js相机参数及Z-Fighting问题的解决方案
本主题讨论透视相机以及如何为远距离环境设置合适的视锥体。 推荐:用 NSDT编辑器 快速搭建可编程3D场景 透视相机是一种投影模式,旨在模仿人类在现实世界中看待事物的方式。 这是渲染 3D 场景最常用的投影模式。 - three.js
如果你看一下 Three.js 文档…
AssetBundle中加载SpriteAtlas图集之后卸载异常
1)AssetBundle中加载SpriteAtlas图集之后卸载异常 2)Shader相关问题 3)如何监听GameObject的localScale改变 4)项目中大量的字节文件的合并和热更新方案 5)一个关于相机的几何数学问题 这是第232篇UWA技术知识分享的…

RGB,RGB-D,单目,双目,sterro相机,实例相机介绍
相机—特点及区别
1.相机种类
RGB,RGB-D,单目,双目,sterro相机,实例相机
2.相机特点
2.1单目
只使用一个摄像头进行SLAM,结构简单,成本低
三维空间的二维投影
必须移动相机,才…
android 慢动作触发区域对焦
一、普通模式区域对焦
Android Camera2 实现触摸对焦功能(Touch to Focus) - 简书
关键代码
public void startControlAFRequest(MeteringRectangle rect,CameraCaptureSession.CaptureCallback captureCallback) {MeteringRectangle[] rectangle new MeteringRectangle[]{…
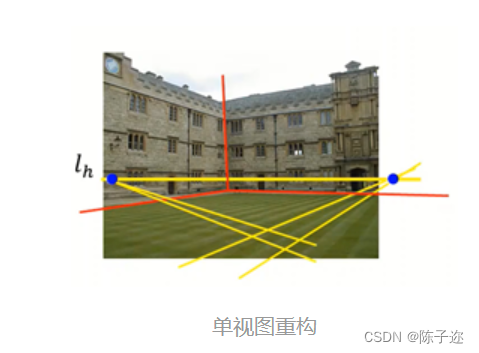
双目视觉实战--单视图测量方法
目录 一.简介
二、2D变换
1. 等距变换(欧式变换)
2. 相似变换
3. 仿射变换
4. 射影变换(透视变换)
5. 结论
三、影消点与影消线
1. 平面上的线
2. 直线的交点
3. 2D无穷远点
4. 无穷远直线
5. 无穷远点的透视变换与仿…
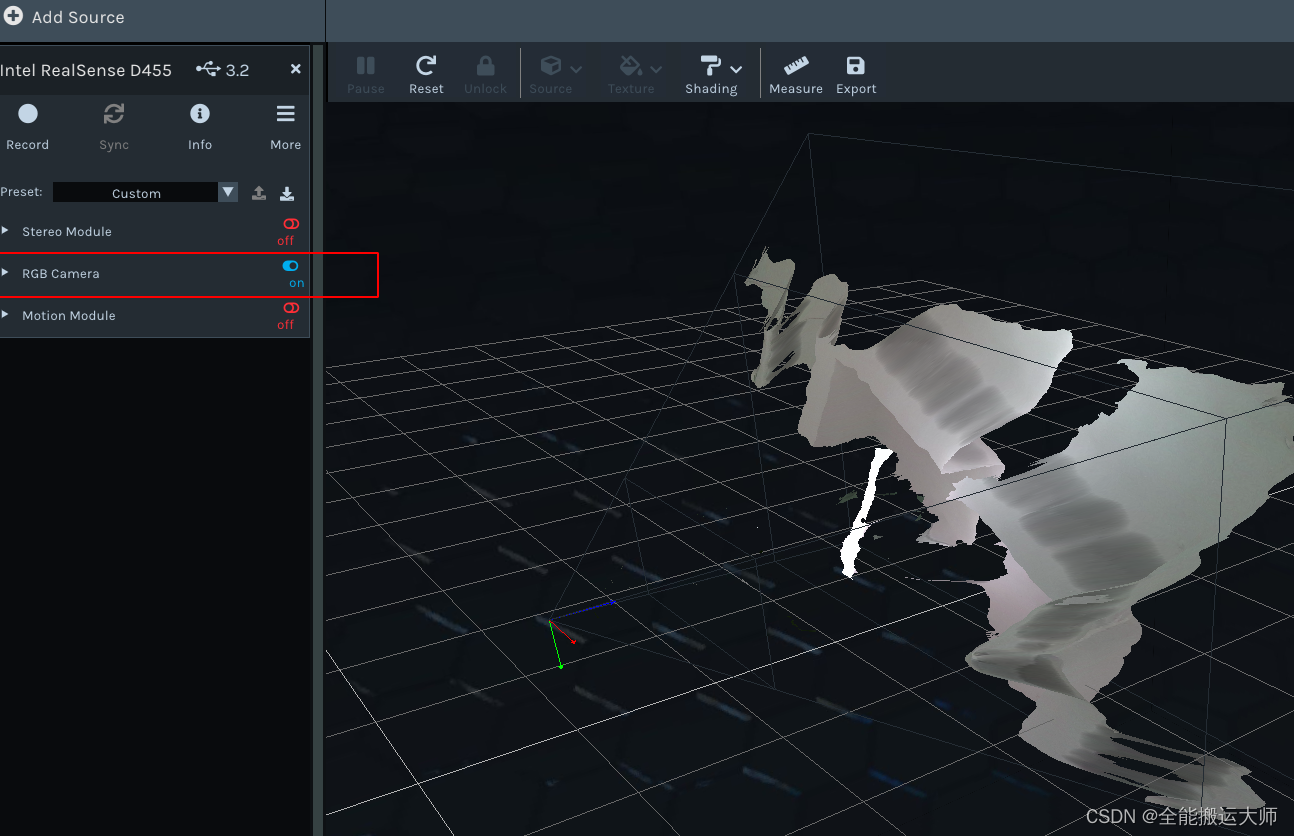
RealSense D455启动教程
环境:
ubuntu20.04 ros:noetic 视觉传感器:Intel RealSense D455
通过命令安装不成功后改为下面源码安装
1. 安装Intel RealSense SDK 2.0 1.1源码安装
1. 下载源码git clone https://github.com/IntelRealSense/librealsense
cd librealsense…
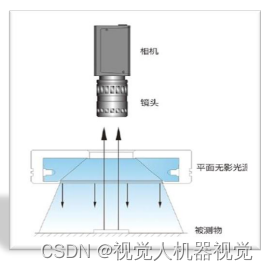
机器视觉系统选型-穹顶光源,方形无影光源,平面无影光源及应用场景
穹顶光源 利用圆顶形状的反射板均匀照射漫射光
磨砂面的刻印、损伤检测金属、玻璃等表面反光较强物体的表面检测印刷检测凹凸不平面的外观检测 方形无影光源 从四个方向照射低角度漫射光电子零件字符识别金属表面划伤检测烟盒表面检测 平面无影光源 从平坦的发光面照射漫射光表…
115.工业相机海康SDK开发指南(阅读)
一、SDK初始化
包含初始化SDK和反初始化SDK接口。(由于看不到函数内部的具体实现,因此以下的解释仅代表个人的理解) 函数说明 MV_CAMCTRL_API int __stdcall MV_CC_Initialize()//初始化SDK 初始化SDK 成功,返回MV_OK;…
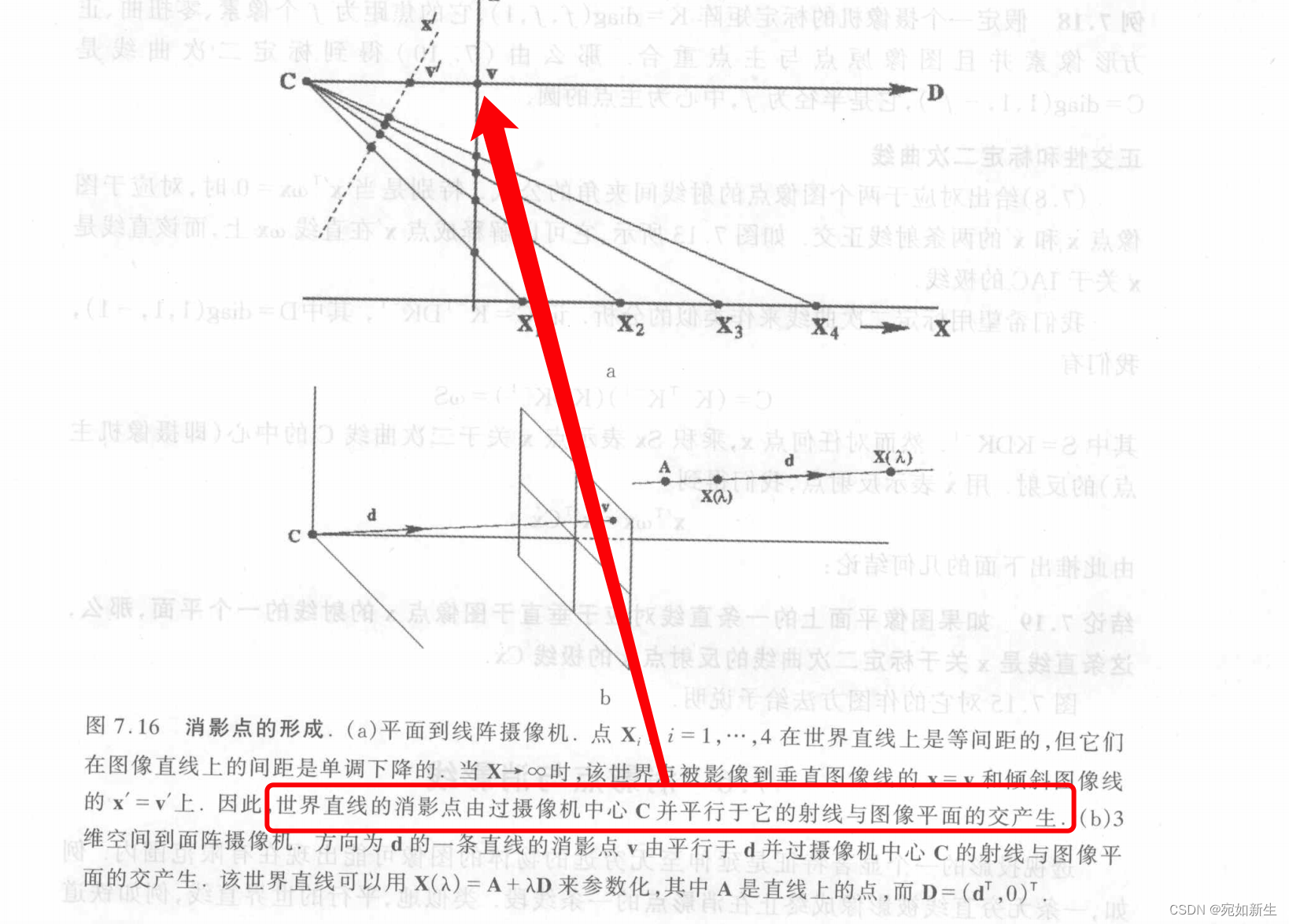
8. 基于消影点进行相机内参(主点)的标定
目录 1. ocam模型2. 消影点3. 基于消影点进行相机主点标定3.1 基于ocam模型的主点标定 感谢大家的阅读。 1. ocam模型
可以参考我的另一篇博客ocam模型。 这里简单提一下ocam模型: 这个模型将中心折反射相机和鱼眼相机统一在一个通用模型下,也称为泰勒模…
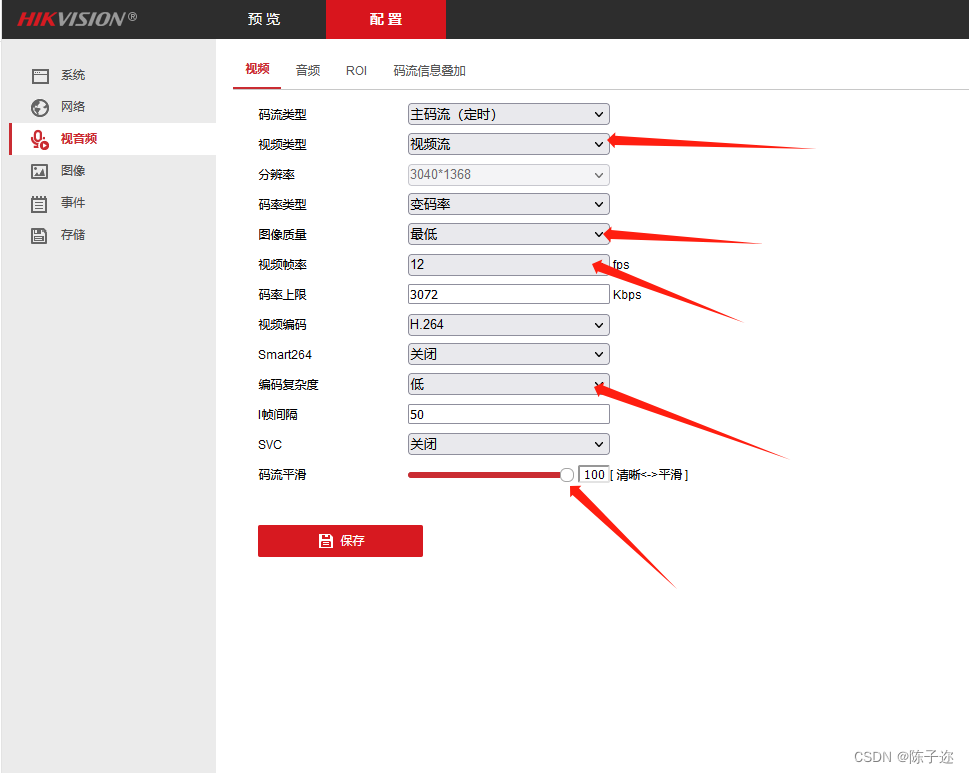
如何降低海康、大华等网络摄像头调用的高延迟问题(二)
目录
1.RTSP介绍
2.解决办法1
3.解决办法2 1.RTSP介绍
RTSP(Real-time Streaming Protocol)是一种用于实时流媒体传输的网络协议。它被设计用于在服务器和客户端之间传输音频、视频以及其他流媒体数据。
RTSP协议允许客户端通过与服务器建立RTSP会话…
C语言中自己实现了一个排序为什么会比 qsort 的速度慢几十倍不止
C语言中自己实现了一个排序,为什么会比 qsort 的速度慢几十倍不止? 讲到算法,有一个非常重要的前置知识叫时间复杂度,脱离了这个讲算法的优劣是没什么意义的。这个概念主要是指,你数据量的增加,会让算法的处理时间增加…

机器视觉行业,日子不过了吗?都进入打折潮,双11只是一个借口,打广告出新招,日子不好过是真的
我就不上图了,大家注意各个机器视觉公司公众号,为什么打折?打广告也只是宣传手段,进入打折潮,内卷严重,价格战变成白刃战,肯定日子不好过了。
[iOS 相机相册调用] UIImagePickerController 简单实用 [转]
##[转] 文/Shelin(简书作者) 原文链接:http://www.jianshu.com/p/e70a184d1f32 著作权归作者所有,转载请联系作者获得授权,并标注“简书作者”。**
在iOS中要拍照和录制视频最简单的方式就是调用UIImagePi…

江湖再见,机器视觉兄弟们,我已经提离职了,聪明的机器视觉工程师,离职不亏本!
我闻江湖已叹息,又闻人间繁闹闹。同为布衣沦落人,相逢何必曾相识。 此生谁料事事休,道不尽人情冷暖,聚散离合总平常,不似勇气少年时。 我估计今年公司年底是发不出工资了,因为订单续不上。年终奖更是没有&…

SLAM学习——相机模型(针孔+鱼眼)
针孔相机模型
针孔相机模型是很常用,而且有效的模型,它描述了一束光线通过针孔之后,在针孔背面投影成像的关系,基于针孔的投影过程可以通过针孔和畸变两个模型来描述。 模型中有四个坐标系,分别为world,c…
Unity:鼠标【上下左右滑动时】控制相机【左右张望】和【上下抬头】
相机旋转,看着是小事,但是却关系到用户的直观体验。旋转对了母慈子孝,旋转错了则翻江倒海。
一、功能
鼠标左右移动时,控制相机左右转动 鼠标上下移动时,控制相机抬头低头
二、被GPT带翻的过程
你可以在GPT里提问&…
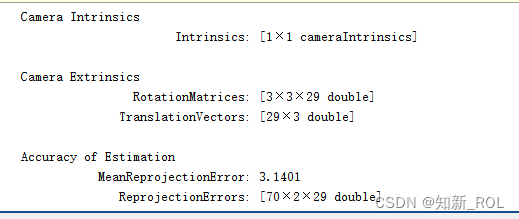
标定板生成网址,可以直接打印,matlab标定工具箱
Camera Calibration Pattern Generator – calib.io matlab 打开标定的成像
cameraCalibrator 点击完成之后
命令行中输入
cameraParams.IntrinsicMatrix
工业镜头中的远心镜头与普通镜头的光路
普通镜头: 主光线与镜头光轴有角度,工件上下移动时,像的大小有变化。 FOV>镜头前端直径。
物方远心镜头: 物方主光线平行于光轴,物距发生改变时,像高不会发生改变,测得的物体尺寸大…

Android 相机库CameraView源码解析 (一) : 预览
1. 前言
这段时间,在使用 natario1/CameraView 来实现带滤镜的预览、拍照、录像功能。 由于CameraView封装的比较到位,在项目前期,的确为我们节省了不少时间。 但随着项目持续深入,对于CameraView的使用进入深水区,逐…

苹果备货量创新高,潜望镜头立大功,iPhone 15 Pro Max备受瞩目
根据郭明锤的简讯内容,关于苹果公司未来发布的iPhone 15系列,有一些令人振奋的消息。据预测,苹果公司计划于下个月发布iPhone 15系列,其中最高配置的机型iPhone 15 Pro Max备货量预计将占整个系列的35%至40%,这一比例超…
[Unity实战]相机观察物体
在原有的旋转、缩放的基础上加上了“惯性”。 using UnityEngine;
using System.Collections;public class CameraObserve : MonoBehaviour {public Transform targetObj;public float rotateSpeed 100f;public float translateSpeed 10f;public float minDistance 3f;//缩放…


高仿微信Android自定义全屏相机(CustomCamera)
需求
高仿手微的全屏自定义相机(Custom Camera),拍照和预览都是全屏尺寸,适配任何机型。使用Camera API,告别摄像头PictureSize的限制。 本demo实现了全屏预览、全屏拍照、两指拖动缩放、自动聚焦、手动聚焦显示聚焦框、闪光灯。 下一版本…
2.4.1.1 相机内参标定
相机内参标定
更多内容,请关注: github:https://github.com/gotonote/Autopilot-Notes.git
相机内参标定主要是为了获取相机本身的性质参数,包括相机的焦距,光心以及畸变参数等。
内参的物理意义与相机模型强相关&a…

线扫相机品牌汇总(国外+国内)
线扫相机品牌汇总(国外+国内) 行者
热爱生活
22 人赞同了该文章
线扫相机也叫做线阵相机,和面阵相机一样,都是重要的工业相机。
线扫相机正如其名字那样,拍照时像扫描一样,相机和被拍照物体有相对匀速运动。 Perhaps the most common example of line scan imagin…
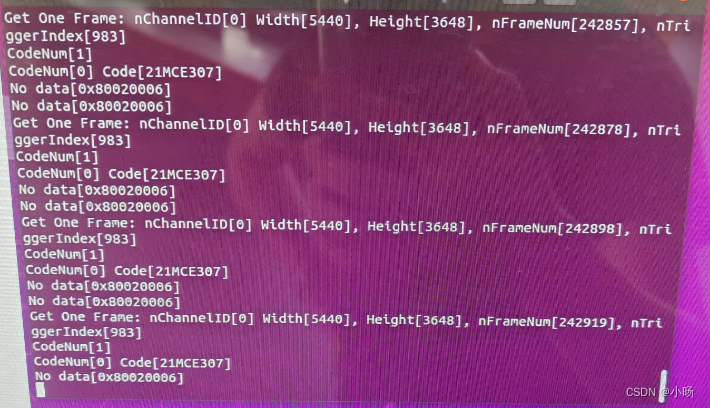
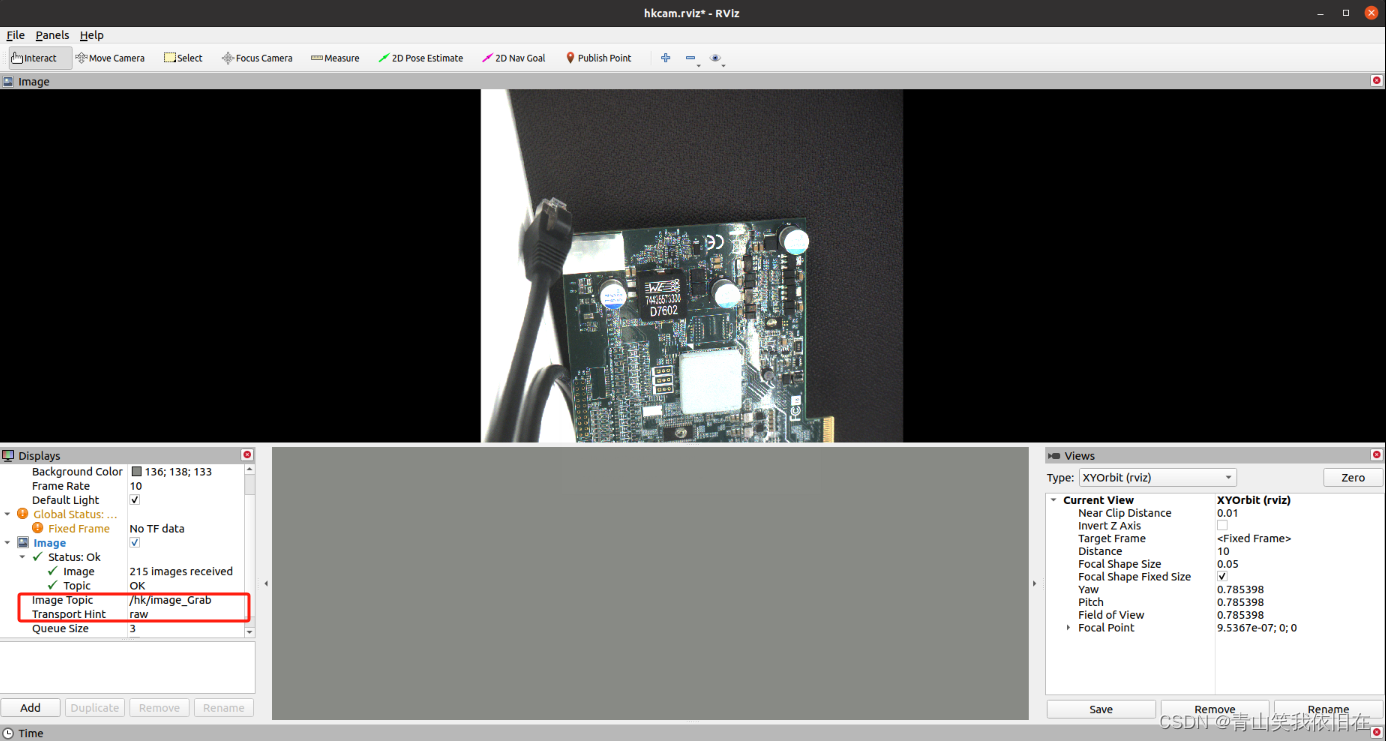
Ubuntu 连接海康智能相机步骤(亲测,成功读码)
ubuntu20.04下连接海康智能相机 Ubuntu 连接海康智能相机步骤(亲测,已成功读码)输出的结果 Ubuntu 连接海康智能相机步骤(亲测,已成功读码)
(就是按照海康的提供的步骤和源码连接相机,流水账)
安装Ubuntu20.04安装gcc和g,IDmvs只…
cesium相机视角跳转和缩放至entity方法汇总
下面汇总的相机视角跳转方法有很多种,都是根据某一个经纬度高程坐标[x,y,z],Entity实体或者矩形四至范围[west , south , east , north]作为视图跳转到目标范围的中心,然后在该位置上设置相机相对的偏移量,这个偏移量主要是设置相…
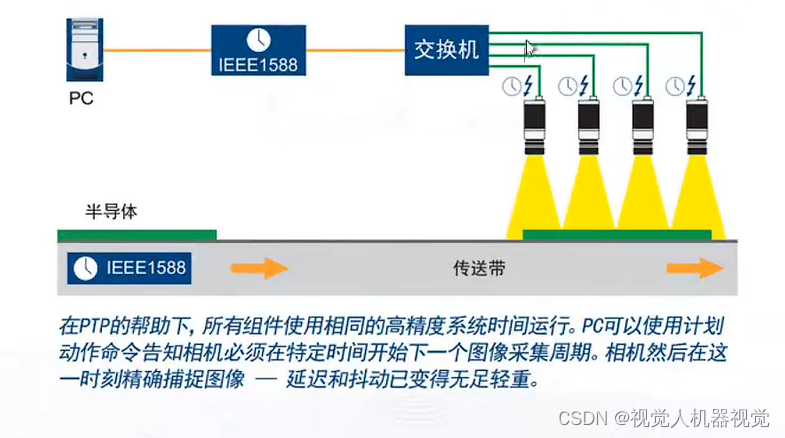
海康多个相机如何提高同时取像
PTP全称为Precision Time Synchronization Protocol,.即精确时间同步协议,它实现的是IEEE标准1588中定义的 PTP版本。用于对标准以太网或其他采用多播技术的分布式总线系统中的传感器、执行器以及其他终端设备中的时钟进行亚微秒级同步。EEE1588可以以纯软件的方式实…

相机的介绍--新手入门级介绍
目录
一:单反和微单(无反)
二:存储卡
三:全画幅和c画幅
四:焦距和光圈
4.1 焦距
4.2光圈
五:相机品牌 相机最大的两个类别:胶片和数码。
一:单反和微单ÿ…

ROS系统读取USB相机图像数据
ROS系统读取USB相机图像数据 前言usb_cam 功能包下载与编译摄像头选择连接摄像头可配置参数 前言
usb_cam功能包简介 为了丰富机器人与外界的交互方式,已经增加了与机器人的语音交互方式,不仅使机器人能够说话发声,还能听懂我们说的话&#…
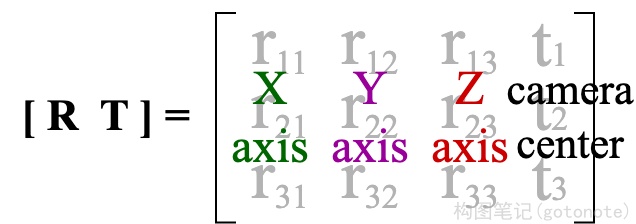
1.2.1 相机模型—内参、外参
相机模型-内参、外参
更多内容,请关注: github:https://github.com/gotonote/Autopilot-Notes.git)
针孔相机模型,包含四个坐标系:物理成像坐标系、像素坐标系、相机坐标系、世界坐标系。
相机参数包含&…

Android:实现手机前后摄像头预览同开
效果展示 一.概述
本博文讲解如何实现手机前后两颗摄像头同时预览并显示
我之前博文《OpenGLES:GLSurfaceView实现Android Camera预览》对单颗摄像头预览做过详细讲解,而前后双摄实现原理其实也并不复杂,粗糙点说就是把单摄像头预览流程写两…
cesium键盘控制相机位置和姿态
该类主要用于监听键盘事件并在用户按下不同按键时执行相应的相机操作,如改变相机的位置、偏航角、俯仰角和翻滚角,从而实现在三维场景中的漫游。
以下是代码的主要逻辑: 导入Cesium库,并定义一个flags对象,其中包含了…
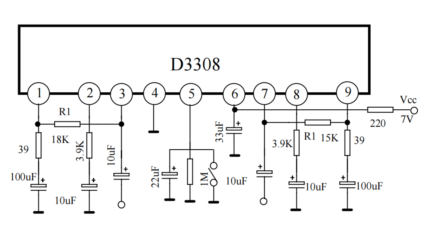
应用方案 | 内置ALC的音频前置放大器D2538A和D3308芯片
一、应用领域 D2538A和D3308是推出的两款内置ALC(音频限幅器)的前置音频放大器芯片,其中D2538A为单通道,D3308为双通道,它特别适用于胎心仪、个人医疗防护、立体声收录机、盒式录音机等涉及音频放大与限幅的产品方案。…

Android 使用Camera1实现相机预览、拍照、录像
1. 前言
本文介绍如何从零开始,在Android中实现Camera1的接入,并在文末提供Camera1Manager工具类,可以用于快速接入Camera1。 Android Camera1 API虽然已经被Google废弃,但有些场景下不得不使用。 并且Camera1返回的帧数据是NV21…

十分钟实现 Android Camera2 相机预览
1. 前言
因为工作中要使用Android Camera2 API,但因为Camera2比较复杂,网上资料也比较乱,有一定入门门槛,所以花了几天时间系统研究了下,并在CSDN上记录了下,希望能帮助到更多的小伙伴。
2. Camera2 API …
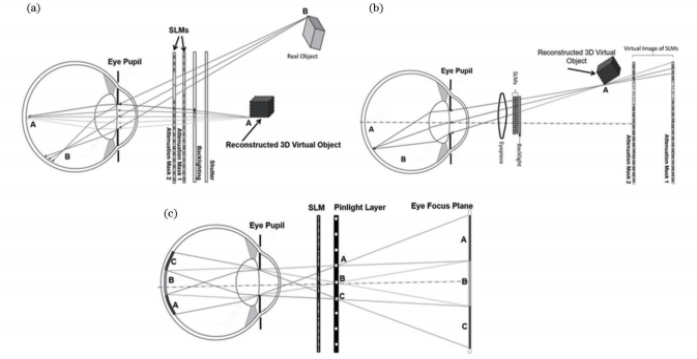
【前沿】头戴式光场显示技术研究进展
摘要:光场显示器旨在通过重建三维场景在不同方向发出的几何光线来渲染三维场景的视觉感知,从而为人的视觉系统提供自然舒适的视觉体验,解决传统平面立体三维显示器中的聚散调节冲突问题。近年来,多种光场显示方法被尝试应用到头戴…

Android 相机库CameraView源码解析 (二) : 拍照
1. 前言
这段时间,在使用 natario1/CameraView 来实现带滤镜的预览、拍照、录像功能。 由于CameraView封装的比较到位,在项目前期,的确为我们节省了不少时间。 但随着项目持续深入,对于CameraView的使用进入深水区,逐…
【其他】sd卡的照片在相机上能看到在电脑上却看不到
sd卡的照片在相机上能看到在电脑上却看不到 前情提要:太长不看版解决办法:思路:一、首先考虑恢复数据二、 解决文件后缀是exe的问题 前情提要:
在相机里可以看到照片和视频,但是SD卡通过读卡器插入电脑看不到&#x…
视觉SLAM中的相机分类及用途
视觉SLAM(Simultaneous Localization and Mapping)算法主要用于机器人和自动导航系统中,用于同时进行定位和建立环境地图。这种算法依赖于相机来捕捉环境数据。根据视觉SLAM的具体需求和应用场景,可以使用不同类型的相机。以下是用…
【教程】autojs使用Intent打开相机拍照并指定存储路径
转载请注明出处:小锋学长生活大爆炸[xfxuezhang.cn] var photoPath "/sdcard/a.jpg";
var photoFile new java.io.File(photoPath);
if (!photoFile.exists()) {photoFile.getParentFile().mkdirs();}
try {photoFile.createNewFile();
} catch (e) {to…
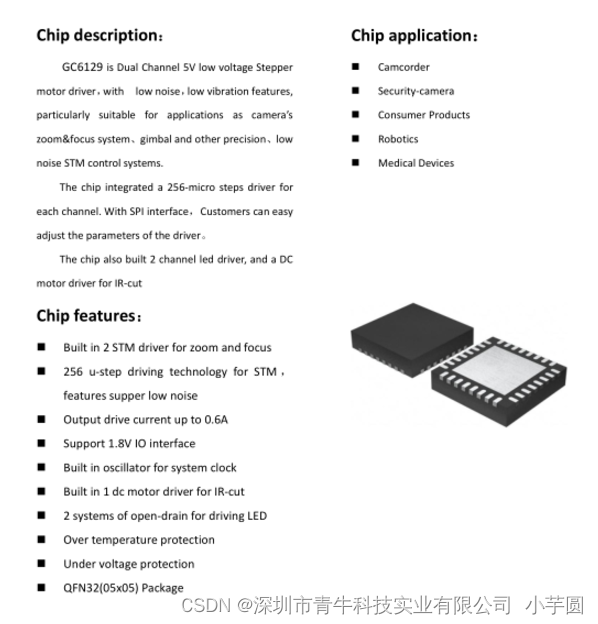
双通道5V高细分步进电机——GC6129,可替代MS41929,具有低噪声、低振动的特点
GC6129是双通道5V低电压步进电机驱动器,具有低噪声、低振动的特点,特别适用于相机的变焦和对焦系统,万向节和其他精密,低噪声STM控制系统。该芯片为每个通道集成了256微步驱动器带SPI接口,用户可以方便地调整驱动器的参…
双目视觉实战--相机几何
目录 一、针孔摄像机和透镜
1. 针孔摄像机的原理
2. 近轴折射模型
3. 镜头畸变问题
二、摄像机几何
1. 数学基础
2. 相机坐标系(空间点)→像素坐标系的映射关系:
3. 规范化投影变换
4. 投影变换的性质
三、其他摄像机模型
1. 弱透视…
计算摄像技术01 - 摄像技术基础知识
一些计算摄像技术知识内容的整理:传统摄像技术中的快门和曝光、图像信号格式。 目录
一、传统摄像技术中的快门和曝光
(1)快门速度
(2)光圈
(3)景深
(4)曝光
二、图…
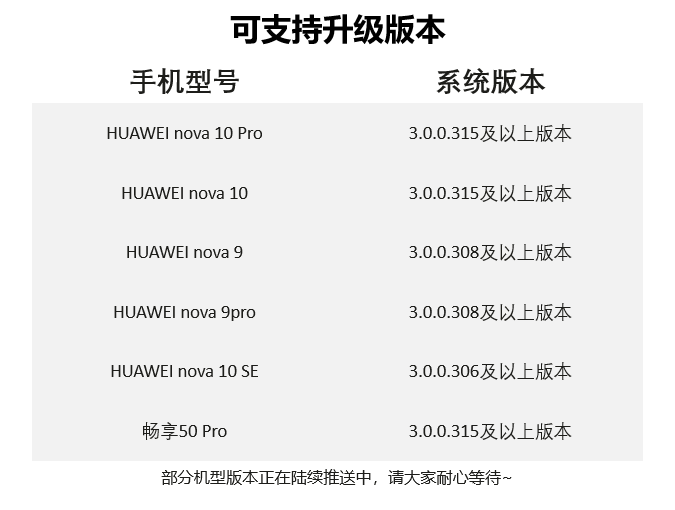
nova相机功能又㕛叒叕升级了!!!拍人像更自然
nova系列手机一直以其高颜值外观和性能体验,持续热销,成为当下年轻人追捧的手机之一。其出色的影像能力,无论是日常生活中的风景拍摄还是人物拍摄,都能够拍摄出非常清晰细腻的照片,同时还配备了多种摄影模式࿰…
Unity Camera -- (2)相机投影设置
在Editor中调整相机 和场景视图中的其他游戏物体一样,相机本身也可以通过使用移动和旋转工具来进行调整。但这种方式比较难用,调整起来又慢又不精确。我们可以使用Move To View功能来快速调整相机所拍摄的画面。 1. 打开Camera_Projection_Scene…
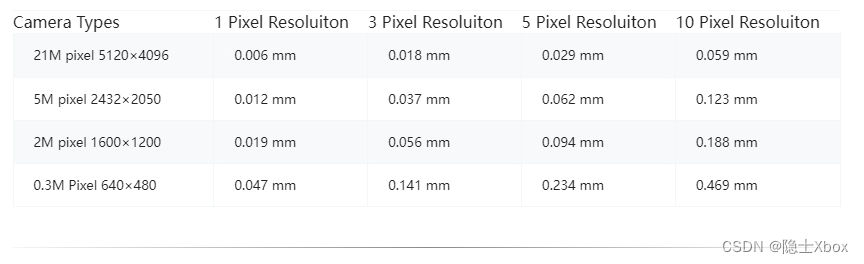
分辨率、精度和公差之间的关系
视觉行业的初学者,甚至是做了1~2年的销售也许还会困惑这样的事情——在拿到检测要求后,不知道根据图纸上的公差,应该选用多少万像素的相机。同时还不明确为什么要三个类似的专有名词来描述同一个事情。
这一期内容就是为了讲明白这一件事情&…
基于ubuntu20.04安装ros系统搭配使用工业相机
基于ubuntu20.04安装ros系统搭配使用工业相机 1. ROS系统安装部署1.1更新镜像源1.1.1 备份源文件1.1.2 更新阿里源1.1.3 更新软件源 1.2 ros系统安装1.2.1 添加ros软件源1.2.2 添加秘钥1.2.3 更新软件源1.2.4 配置及更换最佳软件源1.2.5 ROS安装1.2.6 初始化rosdep1.2.7 设置环…

海康Visionmaster-通讯管理:使用 Modbus TCP 通讯 协议与流程交互
使用 Modbus TCP 通讯协议与视觉通讯,当地址为 0000 的保持型寄存器(4x 寄存器)变为 1 时,触发视觉流程执行一次,同时视觉将地址为 0000 的寄存器复位(也即写为 0),视觉流程执行完成后,将结果数…
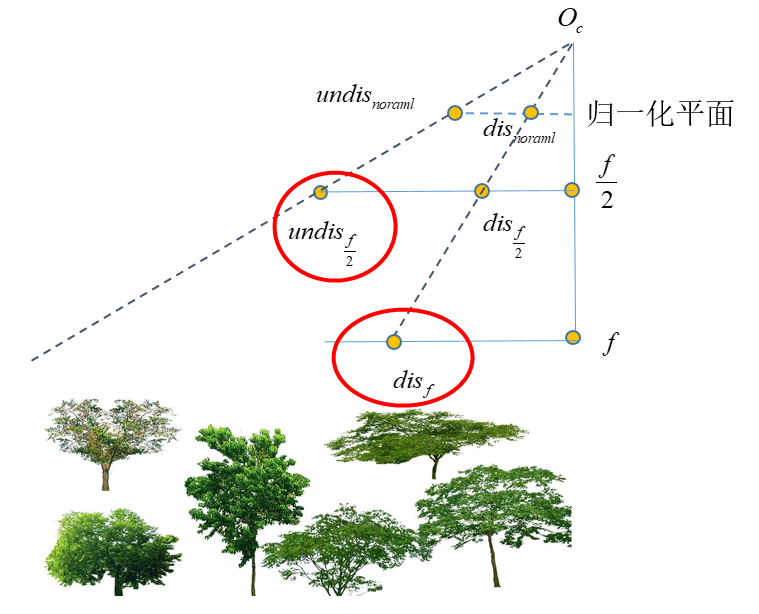
鱼眼图像去畸变python / c++
#鱼眼模型参考链接 本文假设去畸变后的图像与原图大小一样大。由于去畸变后的图像符合针孔投影模型,因此不同的去畸变焦距得到不同的视场大小,且物体的分辨率也不同。可以见上图,当焦距缩小为一半时,相同大小的图像(横…
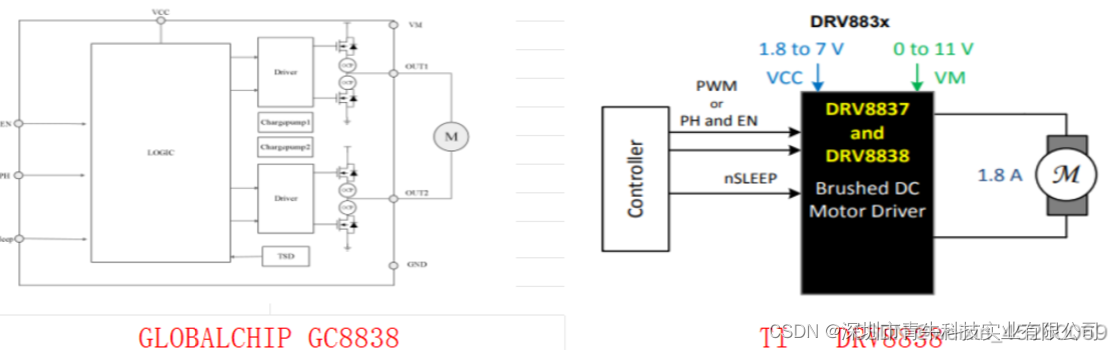
GC8838可替代DRV8838直流电机驱动芯片,应用于摄像机,消费类产品中
GC8838 一款 12V 直流电机驱动芯片,为摄像机、消费类产品、玩具和其他低压或者电池供电的运动控制类应用提供了集成的电机驱动解决方案。芯片一般用了驱动一个直流电机或者使用两颗来驱动步进电机。 可以工作在 0~12V 的电源电压上,能提供高达 1.5A 持续…

自动化PLC工程师能否转到c#上位机开发?
成功从自动化PLC工程师转向C#上位机开发的经历可能因人而异,以下是一些分享的思路和建议:扩展编程技能:学习C#语言和相关的开发工具和框架,掌握语言的基础知识和常用的编程技巧。可以通过在线教程、培训课程、书籍等途径进行学习&…

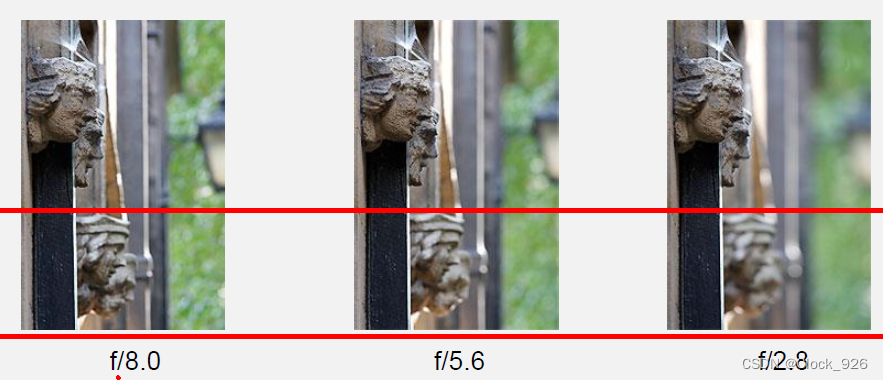
镜头光圈参数详解和示例,如F2.8-16
光圈: 光圈用F值来表示,以镜头焦距f和通光孔径D的比值来衡量。F值越大,光圈越小;F值越小,光圈越大。 镜头表面标的F2.8-16是指相机镜头孔径的大小。如上图所示,光圈大小F2.8-16范围是F2.8、F4、F5.6、F8、…
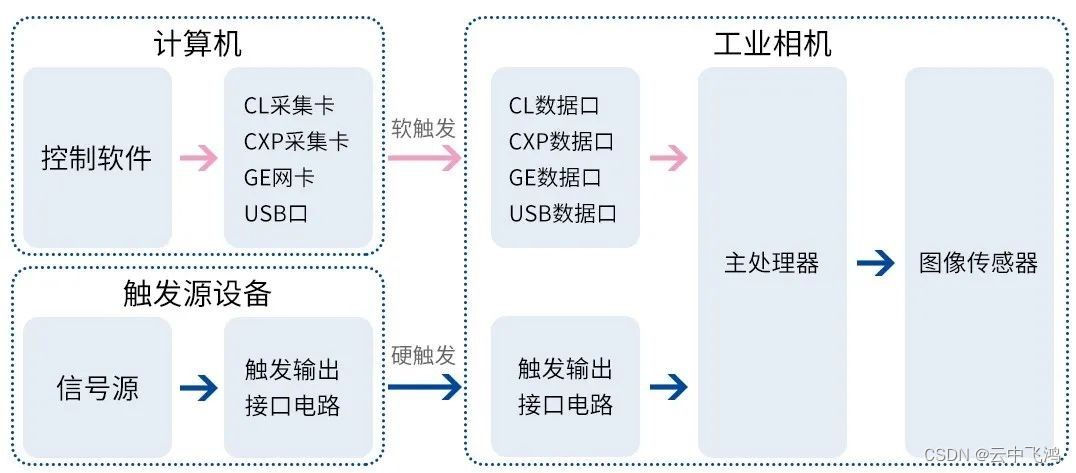
工业相机常见的工作模式、触发方式
参考:机器视觉——工业相机的触发应用(1) - 知乎
工业相机常见的工作模式一般分为:
触发模式连续模式同步模式授时同步模式
触发模式:相机收到外部的触发命令后,开始按照约定时长进行曝光,曝光结束后输出一帧图像。…
相机的CL、USB3.0、1394、USB2.0和GIGE接口详解和区别
相机的CL接口、USB3.0、1394、USB2.0和GIGE接口都是相机中常用的接口类型,它们在功能、传输速率、应用场景等方面存在一些区别。
CL接口:CL接口通常指的是命令行接口(Command Line Interface),它是一种基于文本的交互…
计算机学院的老师们的实际编程能力如何?
计算机学院的老师们的实际编程能力如何?
国内的多数老师基本上就是学术界,工业界,教育界,这三个领域哪个他们都不沾边,几乎就是混日子,顺便能多混点钱就多混点钱的那种。
最近很多小伙伴找我,…

计算线阵相机 到 拍摄产品之间 摆放距离?(隐含条件:保证图像不变形)
一物体被放置在传送带上,转轴的直径为100mm。已知线阵相机4K7u(一行共4096个像素单元,像素单元大小7um),镜头35mm,编码器2000脉冲/圈。保证图像不变形的条件下,计算相机到产品之间 摆放距离&…

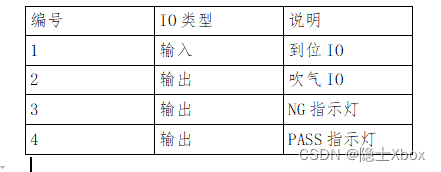
工业相机基本知识理解:工业相机IO接口,功耗和供电方式
I-input 相机接收外部信号,可用于触发相机(硬触发),也可用于定制不同的 功能,例如使用不同信号宽度来改变相机的曝光时间。主要用于现场设 备控制相机使用,常常配合各种传感器使用 O-output 相机输出信号&a…